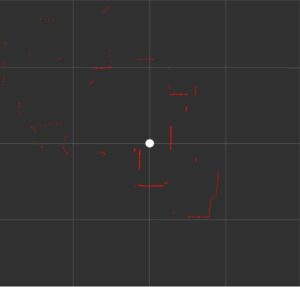
Für die ergänzte Objekterkennung und Distanzmessungen wird ein Lidar verwendet. Dieser dreht sich mit 15 Hz und sendet dabei Laserstrahlen aus, welche nach der Reflexion wieder empfangen werden. Mithilfe der Lichtgeschwindigkeit kann so die Distanz berechnet werden. Durch das ständige Aussenden von Laserstrahlen wird so eine Punktwolke erstellt. Diese wird durch das Anwenden verschiedener Filter auf den relevantesten Teil reduziert.
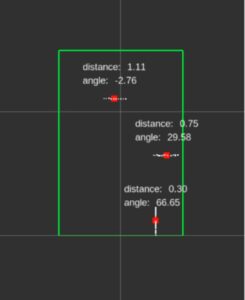
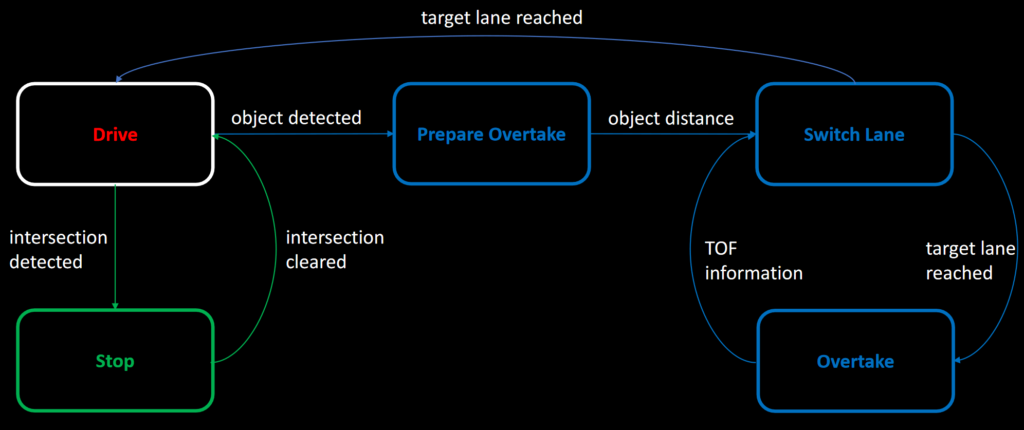
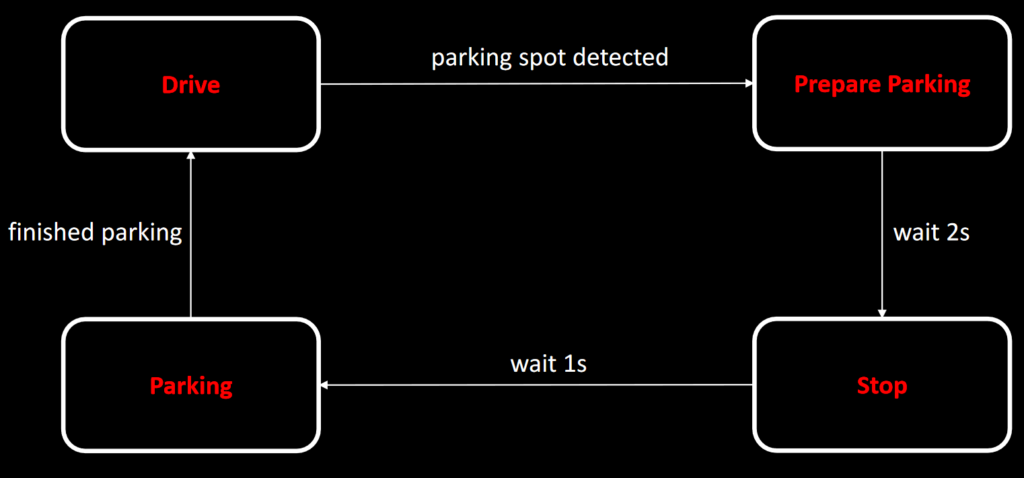
Aktuell wird der Lidar in der Kreuzungssituation verwendet, um Fahrzeuge zu erkennen, welche sich auf der Kreuzung befinden oder Vorfahrt haben. Zukünftig soll der Lidar noch zur Vermessung von Parkplätzen und zur Distanzmessung zu vorausfahrenden Fahrzeugen verwendet werden.
Die Aufgabe des Lidar-Teams besteht in der Integration des Lidars im Fahrzeug, sowie der Auswertung der Sensordaten.